DE NEXT-RAP8¶
Board Identification¶
Identifier: NEXT-RAP8
Yocto MACHINE: de-next-rap8-x86
Features:
- CPU: Onboard 13th Gen Intel Core i5-1335UE (2 cores)
- GPU: Intel Iris Xe Graphic Engine
- RAM: Onboard LPDDR5 up to 16GB
- Storage:
- M.2 M key 2280 (PCIe[x2] x 1 , PCIe[x4] Gen3 x 1)
- SATA 3 x 1
- 2.5 GbE RJ45 x 1 , 1 GbE RJ45 x 1
- AMI BIOS, UEFI
- USB 3.2 Gen2 x 2 , USB 2.0 x 4
- Video & sound: HDMI 1.4b x 1. eDP x 1
- DC Jack. 12V in
- RS 232/422/285 x 2 (Pin Header) - 8-bit GPIO
Boot Sequence¶
- The UEFI loads the Comboapp and starts the Kernel
- The kernel mounts the initial ram file system (initramfs) and starts Init
- The Init checks the UEFI environment and synchronizes the UEFI variables with Bootflags (A reboot may occur in this step to update the UEFI environment)
- The Init mounts the active partitions and runs the init system (systemd)
First Installation¶
- On your PC:
- Install the
.wicfile in the boot device/disk - Plug the peripheral into the target machine
- Install the
Warning
Make sure that the WELMADEV variable is correct before running the
commands, dd will irreversibly override the targeted
device and any data it contains.
-
On the target machine:
- Power on the target machine
- Enter the UEFI menu
-
In the
Bootmenu, set the device containing Welma as the first boot option. If the device containing Welma is the only one connected, Welma will automatically start up as shown in the following image: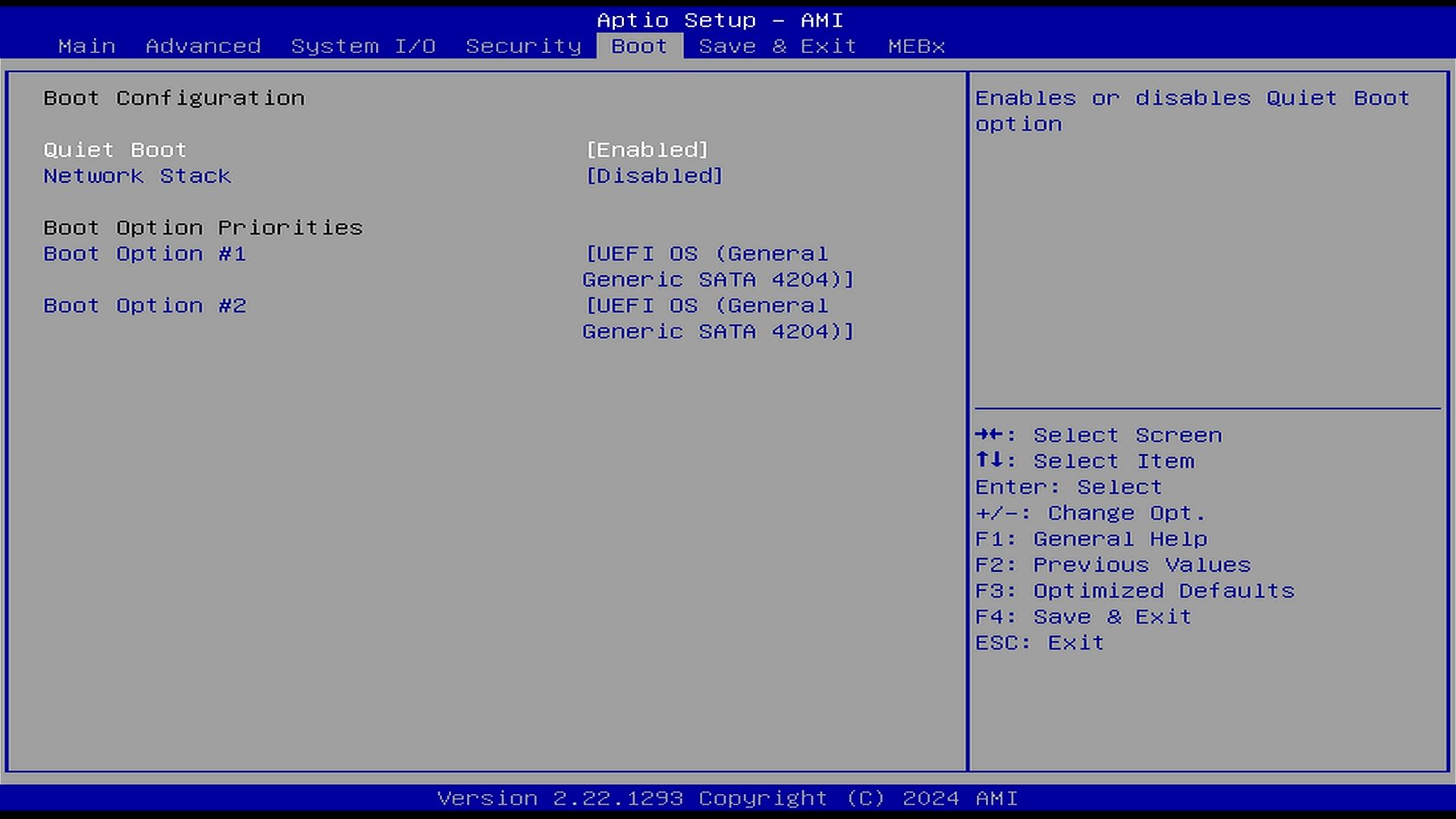
-
The UEFI will load and execute the selected boot entry
- Welma checks the UEFI environment at each boot, in the case of the first boot, the UEFI environment will be updated and the system will reboot.
- After this boot, UEFI will launch the comboapp contained in the first partition of the Welma disk
(the boot order may change and the Welma boot entries will be tagged with the chosen labels:
BOOT AandBOOT Bin the following example).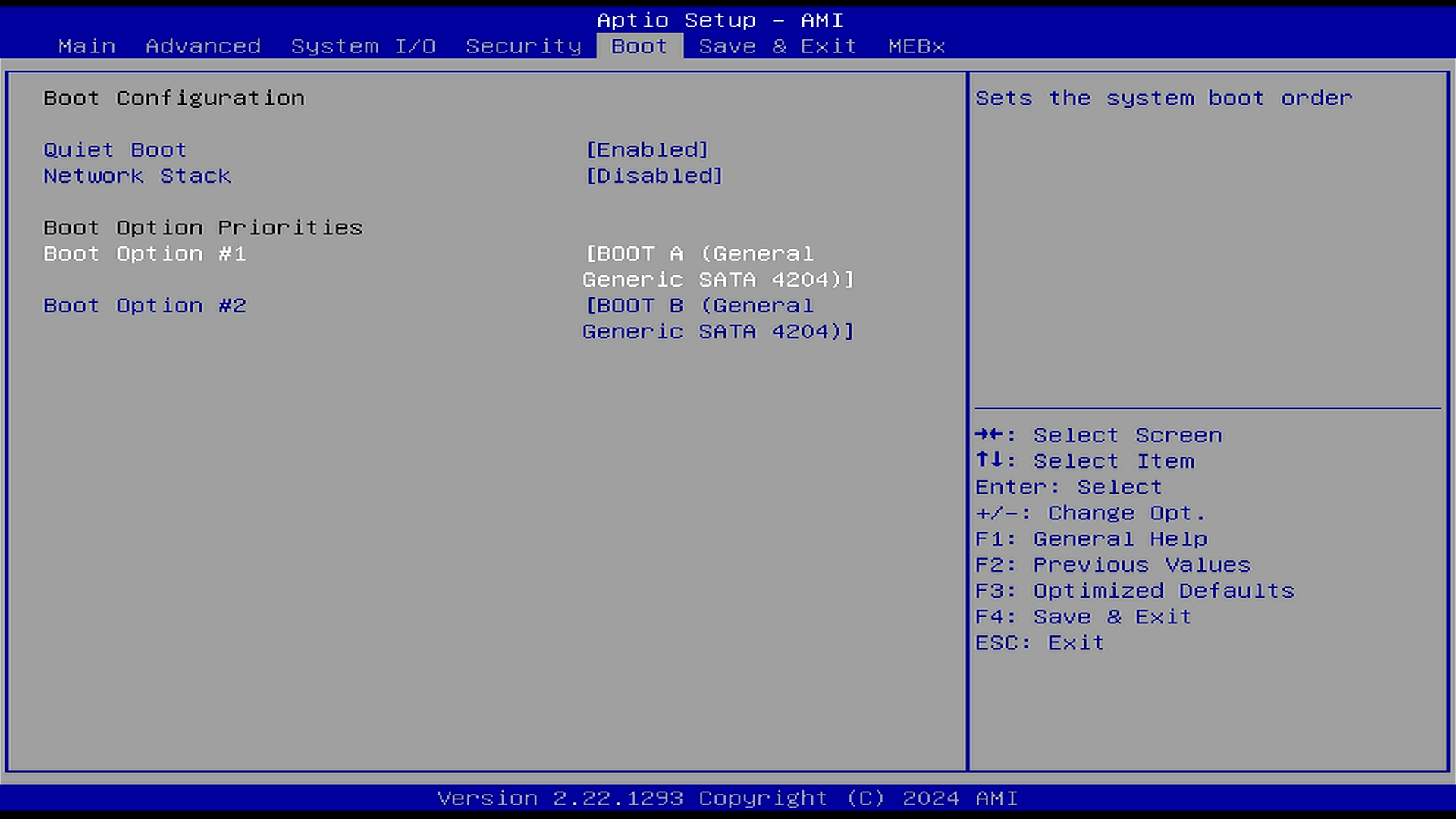
Appendix¶
Hardware Watchdog¶
De NEXT-RAP8 uses the Fintek F81966 chip as a hardware watchdog.
-
The watchdog can be Configured from the UEFI menu (in
Advanced->AAEON BIOS Robot):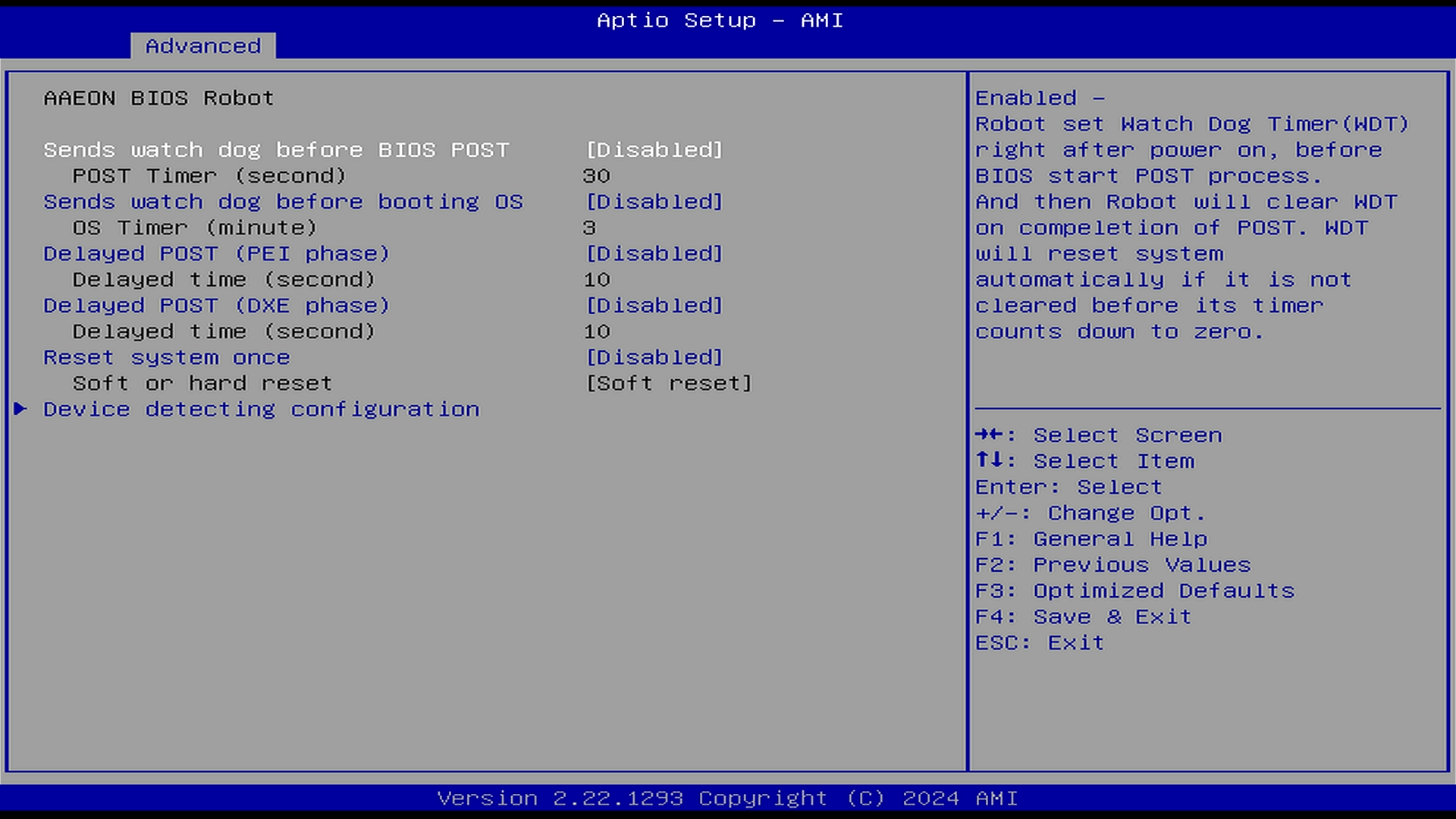
-
The watchdog is then serviced by the kernel (as long as no userspace process opens
/dev/watchdog0and takes over)
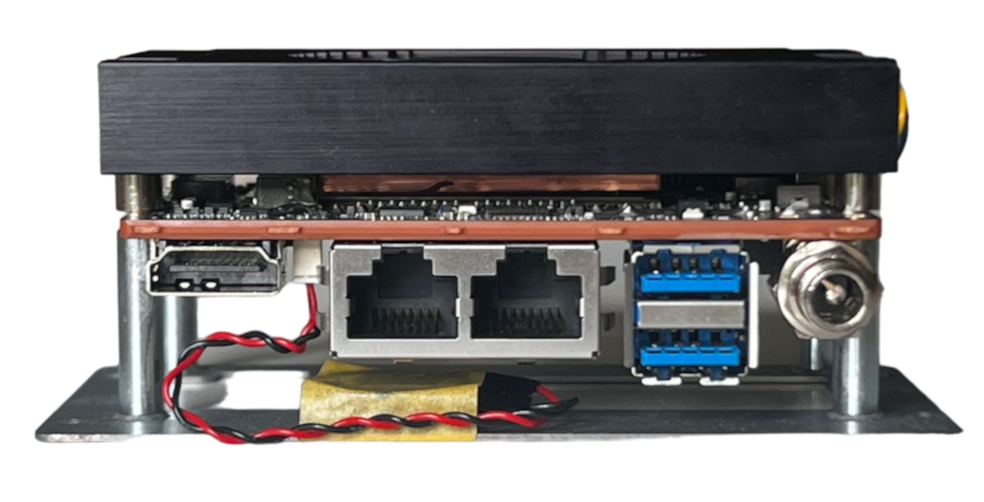
Connections¶
-
Power, USB, USB and HDMI ports
-
JCOM1 pins (mating connectors for COM, USB 2.0, DIO header) on the board

-
JCOM1 connector cables
